

уЃГжЌеТјеУЇљ
 ТБђТхІУ«цУ»ЂС║║УёЅС║цТхЂжђџУ«»тйЋ
ТБђТхІУ«цУ»ЂС║║УёЅС║цТхЂжђџУ«»тйЋ
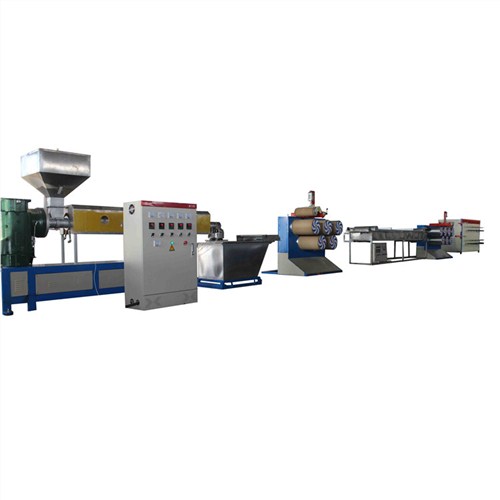
СЙЏт║ћуЃЪтЈ░тАЉТќЎТІЅСИЮТю║С╗иТа╝С╗иТа╝ж▓ЂжђџСЙЏ
- У┐ЎуюЪСИЇТў»ТѓежюђУдЂуџёС║ДтЊЂ№╝Ъ
- тЊЂсђђсђђуЅї№╝џ
- ж▓Ђжђџ
- уЏ┤ТјЦТЈљжЌ« | тЏъждќжАхТљю
- тЄ║ тјѓ С╗и№╝џ
- 0
- СИ╗УдЂУДёТа╝№╝џ
- 0
- ућесђђсђђжђћ№╝џ
ТЋ┤СИфСйЊу│╗уџёт«ъжфїжђЪт║дтѕХСйюС╗јТЏЕТўћуџёжђєтЈўтЎеуџётє│У««№╝їтЏаСИ║Тю║Тб░ти«жћЎтњїСИђСИфу╗Ўт«џуџёжђЪт║д№╝їтљёТю║СИ╗тјІу╝ЕТ»ћтњїтЄЈжђЪТ»ћ№╝їТаИу«ЌтЄ║уџёУи»жђћуџёТеАтЁи№╝їТеАтЁиуџёуБеТЇЪ№╝їТЅђС╗ЦТюЅт┐Ёт«џуџёти«т╝ѓ№╝їу╗Ўт«џуџётЈѓТЋ░тђ╝тњїт«ъУихтђ╝уџёт╝атіЏУЄѓТЮЦу║аТГБУ┐ЎуДЇти«т╝ѓсђѓС║Іт«ъСИі№╝їТюЅТќ╣СйЇС╝аТёЪтЎеУАћТјЦтљјуџёт╝атіЏУЄѓ№╝їСИѕжЄЈуџёт╝атіЏУЄѓуџёТЌІУйгУДєуѓ╣уџёС╝аТёЪтЎе№╝їтАЉТќЎТІЅСИЮТю║уџёСИђСИф010VуџёТеАТІЪС┐АтЈиУЙЊтЄ║тѕ░жђєтЈўтЎе№╝їТЅђУ┐░жђєтЈўтЎеуџёТќ╣СйЇУ«Йт«џтђ╝№╝ѕУ»ЦуЏИт»╣уЎЙтѕєТ»ћтђ╝10V№╝Ѕ№╝їPIDТаИу«Ќтљј№╝їУЙЊтЄ║жбЉујЄСИітЈатіауџёТаАт»╣жЄЈ№╝їС╗ЦТХѕжЎцСИіУ┐░уџёти«т╝ѓсђѓ

УћАт╣┐тЇј
- [УЂћу│╗ТЌХУ»иУ»┤ТўјТЮЦУЄфТБђТхІжђџ]
- тюеу║┐т«бТюЇ№╝џ
-
- уЋЎУеђтњеУ»б
- УЂћу│╗Тќ╣т╝Ј№╝џ
-
У»иуѓ╣тЄ╗ТЪЦуюІућхУ»Ю
- жѓ«С╗Х№╝џ
- тЈЉжђЂжѓ«С╗Х
- тю░тЮђ№╝џ
- т▒▒СИюуюЂуЃЪтЈ░тИѓУј▒тиътИѓтЪјТИ»Уи»УАЌжЂЊт╝ђТўјУи»тїЌждќ1168тЈи
ТјеУЇљС║ДтЊЂ
- жћђтћ«уЃЪтЈ░тАЉТќЎТІЅСИЮТю║ТіЦС╗иТЅ╣тЈЉж▓Ђ
- СЙЏт║ћуЃЪтЈ░тАЉТќЎТІЅСИЮТю║тѕХжђатцџт░Љжњ▒
- ТЈљСЙЏуЃЪтЈ░ТІЅСИЮТю║С╗иТа╝УАїТЃЁж▓ЂжђџСЙЏ
- ТЈљСЙЏуЃЪтЈ░ТІЅСИЮТю║тјѓт«ХТЅ╣тЈЉж▓ЂжђџСЙЏ
- жћђтћ«уЃЪтЈ░тАЉТќЎТїцтЄ║Тю║ТјњтљЇж▓ЂжђџСЙЏ
- СЙЏт║ћуЃЪтЈ░тАЉТќЎТІЅСИЮТю║уј»С┐Ютцџт░Љжњ▒
- СЙЏт║ћуЃЪтЈ░тАЉТќЎТІЅСИЮТю║ућЪС║ДТіЦС╗иж▓Ђ
- СЙЏт║ћуЃЪтЈ░тАЉТќЎТІЅСИЮТю║С╗иТа╝С╗иТа╝ж▓Ђ
- жћђтћ«уЃЪтЈ░ТІЅСИЮТю║Т░Дтїќтцџт░Љжњ▒ж▓Ђжђџ
- жћђтћ«уЃЪтЈ░тАЉТќЎТІЅСИЮТю║ТіЦС╗иТЅ╣тЈЉж▓Ђ
- ТЈљСЙЏуЃЪтЈ░тАЉТќЎТІЅСИЮТю║уЏ┤жћђж▓ЂжђџСЙЏ
- жћђтћ«уЃЪтЈ░тАЉТќЎТІЅСИЮТю║тЊфт«ХтЦйТЅ╣тЈЉ
- СЙЏт║ћуЃЪтЈ░тАЉТќЎТІЅСИЮТю║т«ЅтЁеС╗иТа╝ж▓Ђ
- жћђтћ«уЃЪтЈ░С╝ўУ┤етАЉТќЎТІЅСИЮТю║ТіЦС╗иж▓Ђ
- жћђтћ«уЃЪтЈ░ТЅЂСИЮТІЅСИЮТю║ТіЦС╗иТЅ╣тЈЉж▓Ђ
тЁ│С║јТБђТхІжђџ | ТюЇтіАжА╣уЏ« | тљѕСйюСИГт┐Ѓ | УхёУ«»ТіЋуе┐ | тфњСйЊУЂџуёд | УЂћу│╗ТѕЉС╗г | т«бТюЇСИГт┐Ѓ | уйЉуФЎтю░тЏЙ | тЈІТЃЁжЊЙТјЦ
Copyright ┬Е 2010-2016 ућЪТёЈт«ЮТБђТхІжђџ уЅѕТЮЃТЅђТюЅ.ТхЎICPтцЄ14007955тЈи
![]() ТхЎтЁгуйЉт«ЅтцЄ 33010602010408тЈи
ТхЎтЁгуйЉт«ЅтцЄ 33010602010408тЈи
тю░тЮђ№╝џТхЎТ▒ЪуюЂТЮГтиътИѓУјФт╣▓т▒▒Уи»187тЈиТўЊуЏЏтцДтјд12F жѓ«Тћ┐у╝ќуаЂ№╝џ310012
т«бТюЇQQ:2804879579 ТБђТхІжђџQQуЙц:ТБђТхІУхёТ║љ-У»буЏўсђЂС║║УёЅ 319379593
-
ТБђТхІжђџТЅІТю║уЅѕ 
ТБђТхІжђџт«ўТќ╣тЙ«С┐А
ТБђТхІжђџQQуЙц